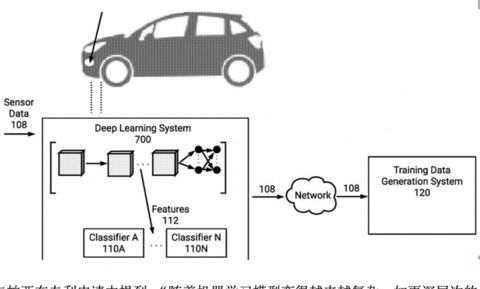
特斯拉向美國專利商標局提交的一項名為“車隊數據獲取用于機器學習模型訓練”的專利申請,再次將公眾視線聚焦于其自動駕駛技術發展的核心戰略——數據驅動。這項專利旨在通過其龐大的全球車主車隊,系統性地收集真實世界駕駛場景的海量視頻與傳感器數據,用以持續訓練和優化其自動駕駛神經網絡。這不僅揭示了特斯拉在完全自動駕駛(FSD)競賽中的關鍵技術路徑,也引發了關于數據隱私、技術壁壘與行業競爭格局的深刻思考。
專利技術的核心在于構建一個高效、自動化的數據管道。特斯拉車輛在獲得車主授權后,能在日常行駛中自動識別并捕獲“邊緣案例”,即那些不常見、難以預測但對自動駕駛系統至關重要的復雜場景,如罕見的交通標志、極端天氣條件下的物體識別、或人類駕駛員非常規的操作行為。這些數據經過匿名化處理后,將被上傳至云端數據中心,成為訓練神經網絡模型的寶貴“燃料”。
與依賴昂貴且覆蓋有限的激光雷達測繪車隊的競爭對手不同,特斯拉憑借其已部署的百萬量級車輛,構建了一個幾乎實時更新、全球覆蓋的“活體”數據庫。這種規模和數據多樣性是任何封閉測試車隊無法比擬的。專利文件顯示,系統能自動篩選出對改進特定神經網絡模塊(如物體檢測、路徑預測)最有價值的片段,極大提升了訓練效率,實現了從數據收集、標注到模型迭代的自動化閉環。
這一戰略的核心優勢在于其強大的網絡效應和持續的自我進化能力。每輛特斯拉汽車都像是一個移動的數據采集節點,每一次系統更新都讓車輛更“聰明”,而更“聰明”的車輛又能收集到更復雜、更高質量的數據用于下一代模型的訓練。這種正向循環構成了特斯拉在感知與決策算法領域可能難以逾越的護城河。
技術的躍進也伴隨著巨大的爭議與挑戰。首要問題便是數據隱私與安全。特斯拉強調其數據收集遵循“隱私保護設計”原則,聲稱視頻片段會進行匿名化處理,且車主可以隨時選擇退出數據共享。但關于數據如何被具體使用、存儲和保護,公眾和監管機構的審視必將日益嚴格。依賴純視覺方案能否最終實現全場景、全氣候的L5級自動駕駛,仍是行業內的長期辯論焦點。
從更廣闊的視角看,特斯拉此舉正在重新定義自動駕駛技術的開發范式。它標志著競爭重心從單純的硬件堆砌和算法創新,擴展到數據生態的構建與運營能力。能否獲取并高效利用大規模、高質量的實時駕駛數據,可能成為決定自動駕駛企業成敗的關鍵分水嶺。
特斯拉的車隊數據專利并非一個孤立的技術點,而是其通往自動駕駛未來宏圖的一塊關鍵拼圖。它通過將全球用戶的日常出行轉化為永不枯竭的訓練資源,試圖讓機器以人類學習駕駛的方式——通過海量經驗——來掌握駕駛技能。這條道路若能成功,將不僅徹底改變我們的出行方式,更將深遠影響整個汽車產業乃至人工智能在現實世界應用的游戲規則。